PyTorch-Style-Transfer
This repo provides PyTorch Implementation of MSG-Net (ours) and Neural Style (Gatys et al. CVPR 2016), which has been included by ModelDepot. We also provide Torch implementation and MXNet implementation.
Tabe of content
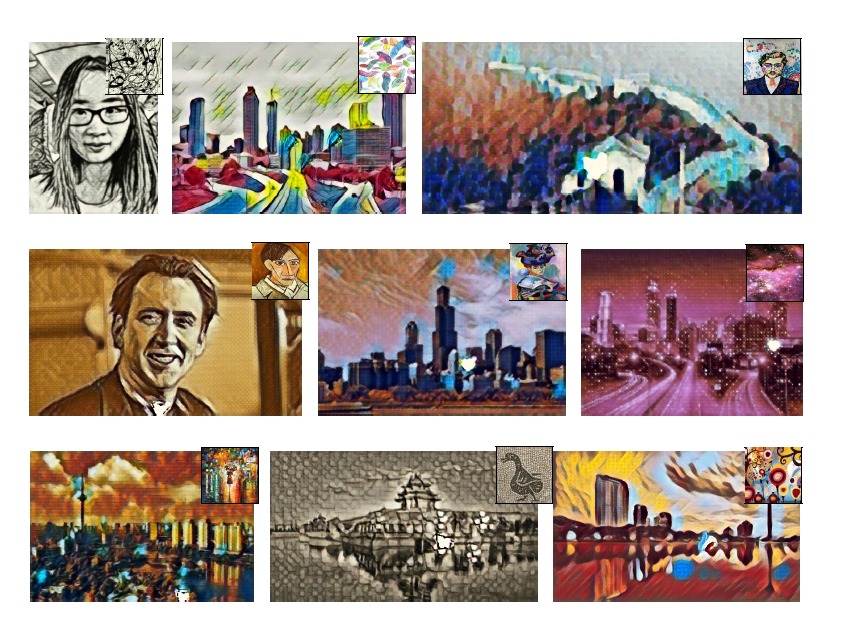
MSG-Net
| Multi-style Generative Network for Real-time Transfer [arXiv] [project] Hang Zhang, Kristin Dana @article{zhang2017multistyle,
title={Multi-style Generative Network for Real-time Transfer},
author={Zhang, Hang and Dana, Kristin},
journal={arXiv preprint arXiv:1703.06953},
year={2017}
}
|
 |
Stylize Images Using Pre-trained MSG-Net
- Download the pre-trained model
git clone [email protected]:zhanghang1989/PyTorch-Style-Transfer.git cd PyTorch-Style-Transfer/experiments bash models/download_model.sh
- Camera Demo
python camera_demo.py demo --model models/21styles.model

- Test the model
python main.py eval --content-image images/content/venice-boat.jpg --style-image images/21styles/candy.jpg --model models/21styles.model --content-size 1024
-
If you don't have a GPU, simply set
--cuda=0. For a different style, set--style-image path/to/style. If you would to stylize your own photo, change the--content-image path/to/your/photo. More options:--content-image: path to content image you want to stylize.--style-image: path to style image (typically covered during the training).--model: path to the pre-trained model to be used for stylizing the image.--output-image: path for saving the output image.--content-size: the content image size to test on.--cuda: set it to 1 for running on GPU, 0 for CPU.









Train Your Own MSG-Net Model
- Download the COCO dataset
bash dataset/download_dataset.sh
- Train the model
python main.py train --epochs 4
- If you would like to customize styles, set
--style-folder path/to/your/styles. More options:--style-folder: path to the folder style images.--vgg-model-dir: path to folder where the vgg model will be downloaded.--save-model-dir: path to folder where trained model will be saved.--cuda: set it to 1 for running on GPU, 0 for CPU.
Neural Style
Image Style Transfer Using Convolutional Neural Networks by Leon A. Gatys, Alexander S. Ecker, and Matthias Bethge.
python main.py optim --content-image images/content/venice-boat.jpg --style-image images/21styles/candy.jpg
--content-image: path to content image.--style-image: path to style image.--output-image: path for saving the output image.--content-size: the content image size to test on.--style-size: the style image size to test on.--cuda: set it to 1 for running on GPU, 0 for CPU.









Acknowledgement
The code benefits from outstanding prior work and their implementations including:
- Texture Networks: Feed-forward Synthesis of Textures and Stylized Images by Ulyanov et al. ICML 2016. (code)
- Perceptual Losses for Real-Time Style Transfer and Super-Resolution by Johnson et al. ECCV 2016 (code) and its pytorch implementation code by Abhishek.
- Image Style Transfer Using Convolutional Neural Networks by Gatys et al. CVPR 2016 and its torch implementation code by Johnson.















 9.5k Jan 07, 2023
9.5k Jan 07, 2023
 13 Dec 16, 2022
13 Dec 16, 2022
 928 Dec 29, 2022
928 Dec 29, 2022
 39 Dec 25, 2022
39 Dec 25, 2022
 3 Apr 12, 2022
3 Apr 12, 2022
 2.5k Jan 04, 2023
2.5k Jan 04, 2023
 567 Dec 26, 2022
567 Dec 26, 2022
 36 Feb 17, 2022
36 Feb 17, 2022
 1.6k Jan 07, 2023
1.6k Jan 07, 2023
 20 Dec 06, 2022
20 Dec 06, 2022
 54 Dec 30, 2021
54 Dec 30, 2021
 92 Jan 04, 2023
92 Jan 04, 2023
 24 Nov 29, 2022
24 Nov 29, 2022
 2 Jan 16, 2022
2 Jan 16, 2022
 254 Dec 12, 2022
254 Dec 12, 2022
 29 Dec 14, 2022
29 Dec 14, 2022
 395 Dec 30, 2022
395 Dec 30, 2022
 45 Dec 15, 2022
45 Dec 15, 2022
 52 Nov 19, 2022
52 Nov 19, 2022
 253 Jan 06, 2023
253 Jan 06, 2023