rliable
rliable is an open-source Python library for reliable evaluation, even with a handful of runs, on reinforcement learning and machine learnings benchmarks.
| Desideratum | Current evaluation approach | Our Recommendation |
|---|---|---|
| Uncertainty in aggregate performance | Point estimates:
|
Interval estimates using stratified bootstrap confidence intervals (CIs) |
| Performance variability across tasks and runs | Tables with task mean scores:
|
Score distributions (performance profiles):
|
| Aggregate metrics for summarizing benchmark performance | Mean:
|
Interquartile Mean (IQM) across all runs:
|
rliable provides support for:
- Stratified Bootstrap Confidence Intervals (CIs)
- Performance Profiles (with plotting functions)
- Aggregate metrics
- Interquartile Mean (IQM) across all runs
- Optimality Gap
- Probability of Improvement
Interactive colab
We provide a colab at bit.ly/statistical_precipice_colab, which shows how to use the library with examples of published algorithms on widely used benchmarks including Atari 100k, ALE, DM Control and Procgen.
Paper
For more details, refer to the accompanying NeurIPS 2021 paper (Oral): Deep Reinforcement Learning at the Edge of the Statistical Precipice.
Installation
To install rliable, run:
pip install -U rliable
To install latest version of rliable as a package, run:
pip install git+https://github.com/google-research/rliable
To import rliable, we suggest:
from rliable import library as rly
from rliable import metrics
from rliable import plot_utils
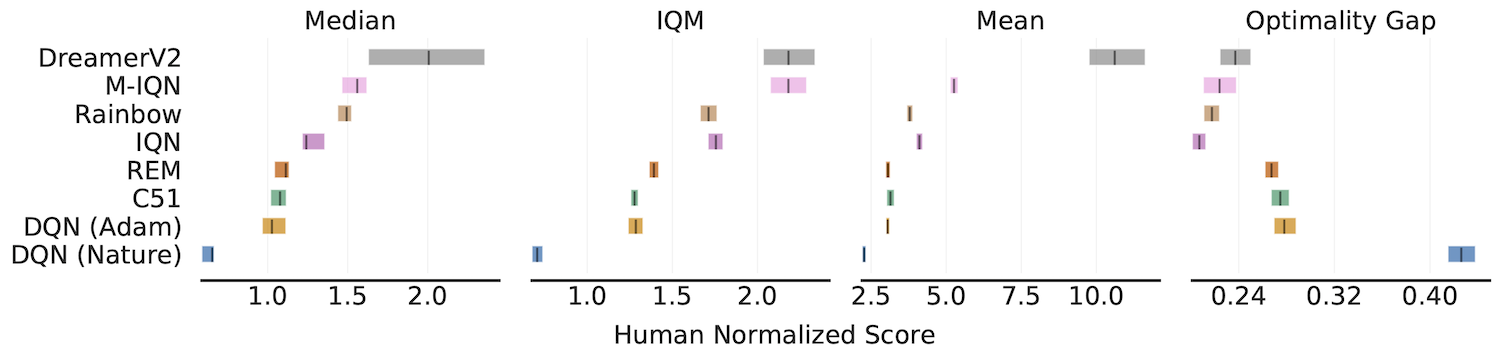
Aggregate metrics with 95% Stratified Bootstrap CIs
IQM, Optimality Gap, Median, Mean
algorithms = ['DQN (Nature)', 'DQN (Adam)', 'C51', 'REM', 'Rainbow',
'IQN', 'M-IQN', 'DreamerV2']
# Load ALE scores as a dictionary mapping algorithms to their human normalized
# score matrices, each of which is of size `(num_runs x num_games)`.
atari_200m_normalized_score_dict = ...
aggregate_func = lambda x: np.array([
metrics.aggregate_median(x),
metrics.aggregate_iqm(x),
metrics.aggregate_mean(x),
metrics.aggregate_optimality_gap(x)])
aggregate_scores, aggregate_score_cis = rly.get_interval_estimates(
atari_200m_normalized_score_dict, aggregate_func, reps=50000)
fig, axes = plot_utils.plot_interval_estimates(
aggregate_scores, aggregate_score_cis,
metric_names=['Median', 'IQM', 'Mean', 'Optimality Gap'],
algorithms=algorithms, xlabel='Human Normalized Score')
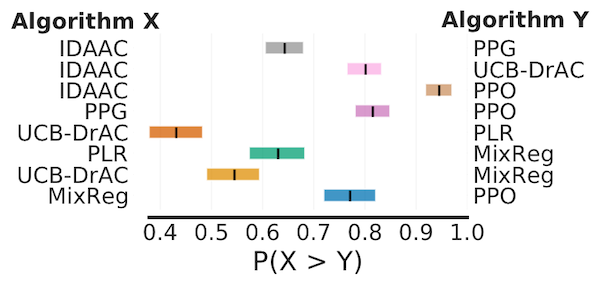
Probability of Improvement
# Load ProcGen scores as a dictionary containing pairs of normalized score
# matrices for pairs of algorithms we want to compare
procgen_algorithm_pairs = {.. , 'x,y': (score_x, score_y), ..}
average_probabilities, average_prob_cis = rly.get_interval_estimates(
procgen_algorithm_pairs, metrics.probability_of_improvement, reps=50000)
plot_probability_of_improvement(average_probabilities, average_prob_cis)
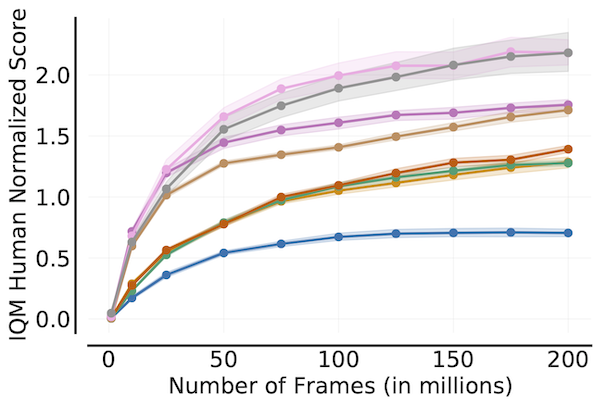
Sample Efficiency Curve
algorithms = ['DQN (Nature)', 'DQN (Adam)', 'C51', 'REM', 'Rainbow',
'IQN', 'M-IQN', 'DreamerV2']
# Load ALE scores as a dictionary mapping algorithms to their human normalized
# score matrices across all 200 million frames, each of which is of size
# `(num_runs x num_games x 200)` where scores are recorded every million frame.
ale_all_frames_scores_dict = ...
frames = np.array([1, 10, 25, 50, 75, 100, 125, 150, 175, 200]) - 1
ale_frames_scores_dict = {algorithm: score[:, :, frames] for algorithm, score
in ale_all_frames_scores_dict.items()}
iqm = lambda scores: np.array([metrics.aggregate_iqm(scores[..., frame])
for frame in range(scores.shape[-1])])
iqm_scores, iqm_cis = rly.get_interval_estimates(
ale_frames_scores_dict, iqm, reps=50000)
plot_utils.plot_sample_efficiency_curve(
frames+1, iqm_scores, iqm_cis, algorithms=algorithms,
xlabel=r'Number of Frames (in millions)',
ylabel='IQM Human Normalized Score')

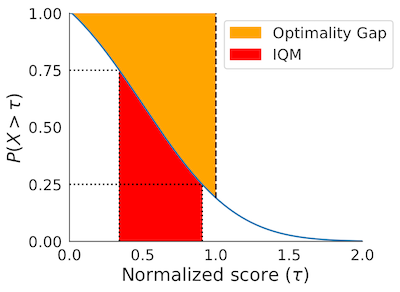
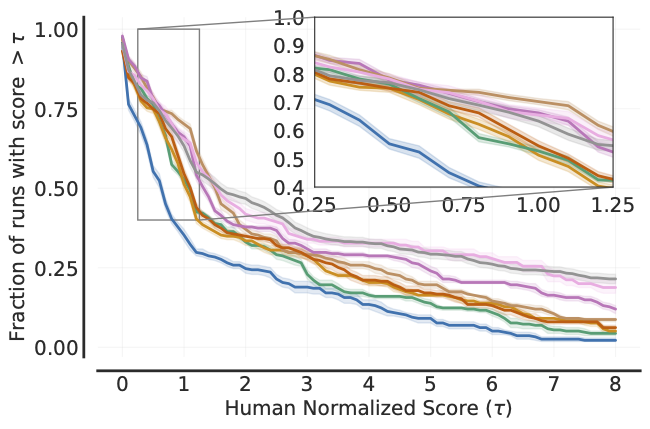
Performance Profiles
# Load ALE scores as a dictionary mapping algorithms to their human normalized
# score matrices, each of which is of size `(num_runs x num_games)`.
atari_200m_normalized_score_dict = ...
# Human normalized score thresholds
atari_200m_thresholds = np.linspace(0.0, 8.0, 81)
score_distributions, score_distributions_cis = rly.create_performance_profile(
atari_200m_normalized_score_dict, atari_200m_thresholds)
# Plot score distributions
fig, ax = plt.subplots(ncols=1, figsize=(7, 5))
plot_utils.plot_performance_profiles(
score_distributions, atari_200m_thresholds,
performance_profile_cis=score_distributions_cis,
colors=dict(zip(algorithms, sns.color_palette('colorblind'))),
xlabel=r'Human Normalized Score $(\tau)$',
ax=ax)
The above profile can also be plotted with non-linear scaling as follows:
plot_utils.plot_performance_profiles(
perf_prof_atari_200m, atari_200m_tau,
performance_profile_cis=perf_prof_atari_200m_cis,
use_non_linear_scaling=True,
xticks = [0.0, 0.5, 1.0, 2.0, 4.0, 8.0]
colors=dict(zip(algorithms, sns.color_palette('colorblind'))),
xlabel=r'Human Normalized Score $(\tau)$',
ax=ax)
Dependencies
The code was tested under Python>=3.7 and uses these packages:
- arch >= 4.19
- scipy >= 1.7.0
- numpy >= 0.9.0
- absl-py >= 1.16.4
Citing
If you find this open source release useful, please reference in your paper:
@article{agarwal2021deep,
title={Deep Reinforcement Learning at the Edge of the Statistical Precipice},
author={Agarwal, Rishabh and Schwarzer, Max and Castro, Pablo Samuel
and Courville, Aaron and Bellemare, Marc G},
journal={Advances in Neural Information Processing Systems},
year={2021}
}
Disclaimer: This is not an official Google product.












 15 Dec 10, 2022
15 Dec 10, 2022
 377 Dec 20, 2022
377 Dec 20, 2022
 363 Dec 28, 2022
363 Dec 28, 2022
 7 Dec 03, 2022
7 Dec 03, 2022
 156 Dec 21, 2022
156 Dec 21, 2022
 30 Nov 30, 2022
30 Nov 30, 2022
 68 Dec 17, 2022
68 Dec 17, 2022
 1 Jun 05, 2022
1 Jun 05, 2022
 0 Dec 14, 2021
0 Dec 14, 2021
 9 Sep 07, 2022
9 Sep 07, 2022
 4.7k Jan 08, 2023
4.7k Jan 08, 2023
 1 Jan 05, 2022
1 Jan 05, 2022
 156 Dec 23, 2022
156 Dec 23, 2022
 6 Nov 18, 2022
6 Nov 18, 2022
 75 Dec 23, 2022
75 Dec 23, 2022
 547 Jan 03, 2023
547 Jan 03, 2023
 145 Jan 05, 2023
145 Jan 05, 2023
 47 Nov 02, 2022
47 Nov 02, 2022
 155 Dec 20, 2022
155 Dec 20, 2022
 1 Jan 10, 2022
1 Jan 10, 2022