You Only Look At CoefficienTs
██╗ ██╗ ██████╗ ██╗ █████╗ ██████╗████████╗
╚██╗ ██╔╝██╔═══██╗██║ ██╔══██╗██╔════╝╚══██╔══╝
╚████╔╝ ██║ ██║██║ ███████║██║ ██║
╚██╔╝ ██║ ██║██║ ██╔══██║██║ ██║
██║ ╚██████╔╝███████╗██║ ██║╚██████╗ ██║
╚═╝ ╚═════╝ ╚══════╝╚═╝ ╚═╝ ╚═════╝ ╚═╝
A simple, fully convolutional model for real-time instance segmentation. This is the code for our papers:
YOLACT++ (v1.2) released! (Changelog)
YOLACT++'s resnet50 model runs at 33.5 fps on a Titan Xp and achieves 34.1 mAP on COCO's test-dev (check out our journal paper here).
In order to use YOLACT++, make sure you compile the DCNv2 code. (See Installation)
For a real-time demo, check out our ICCV video:
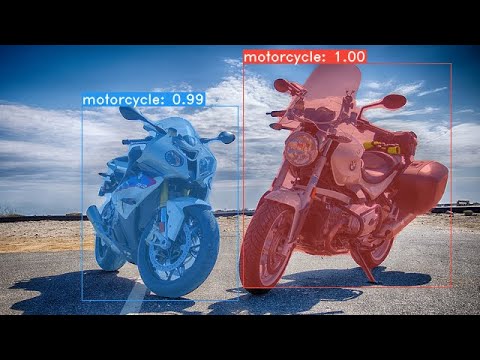
Some examples from our YOLACT base model (33.5 fps on a Titan Xp and 29.8 mAP on COCO's test-dev):



Installation
- Clone this repository and enter it:
git clone https://github.com/dbolya/yolact.git cd yolact - Set up the environment using one of the following methods:
- Using Anaconda
- Run
conda env create -f environment.yml
- Run
- Manually with pip
- Set up a Python3 environment (e.g., using virtenv).
- Install Pytorch 1.0.1 (or higher) and TorchVision.
- Install some other packages:
# Cython needs to be installed before pycocotools pip install cython pip install opencv-python pillow pycocotools matplotlib
- Using Anaconda
- If you'd like to train YOLACT, download the COCO dataset and the 2014/2017 annotations. Note that this script will take a while and dump 21gb of files into
./data/coco.sh data/scripts/COCO.sh
- If you'd like to evaluate YOLACT on
test-dev, downloadtest-devwith this script.sh data/scripts/COCO_test.sh
- If you want to use YOLACT++, compile deformable convolutional layers (from DCNv2). Make sure you have the latest CUDA toolkit installed from NVidia's Website.
cd external/DCNv2 python setup.py build develop
Evaluation
Here are our YOLACT models (released on April 5th, 2019) along with their FPS on a Titan Xp and mAP on test-dev:
| Image Size | Backbone | FPS | mAP | Weights | |
|---|---|---|---|---|---|
| 550 | Resnet50-FPN | 42.5 | 28.2 | yolact_resnet50_54_800000.pth | Mirror |
| 550 | Darknet53-FPN | 40.0 | 28.7 | yolact_darknet53_54_800000.pth | Mirror |
| 550 | Resnet101-FPN | 33.5 | 29.8 | yolact_base_54_800000.pth | Mirror |
| 700 | Resnet101-FPN | 23.6 | 31.2 | yolact_im700_54_800000.pth | Mirror |
YOLACT++ models (released on December 16th, 2019):
| Image Size | Backbone | FPS | mAP | Weights | |
|---|---|---|---|---|---|
| 550 | Resnet50-FPN | 33.5 | 34.1 | yolact_plus_resnet50_54_800000.pth | Mirror |
| 550 | Resnet101-FPN | 27.3 | 34.6 | yolact_plus_base_54_800000.pth | Mirror |
To evalute the model, put the corresponding weights file in the ./weights directory and run one of the following commands. The name of each config is everything before the numbers in the file name (e.g., yolact_base for yolact_base_54_800000.pth).
Quantitative Results on COCO
# Quantitatively evaluate a trained model on the entire validation set. Make sure you have COCO downloaded as above.
# This should get 29.92 validation mask mAP last time I checked.
python eval.py --trained_model=weights/yolact_base_54_800000.pth
# Output a COCOEval json to submit to the website or to use the run_coco_eval.py script.
# This command will create './results/bbox_detections.json' and './results/mask_detections.json' for detection and instance segmentation respectively.
python eval.py --trained_model=weights/yolact_base_54_800000.pth --output_coco_json
# You can run COCOEval on the files created in the previous command. The performance should match my implementation in eval.py.
python run_coco_eval.py
# To output a coco json file for test-dev, make sure you have test-dev downloaded from above and go
python eval.py --trained_model=weights/yolact_base_54_800000.pth --output_coco_json --dataset=coco2017_testdev_dataset
Qualitative Results on COCO
# Display qualitative results on COCO. From here on I'll use a confidence threshold of 0.15.
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --display
Benchmarking on COCO
# Run just the raw model on the first 1k images of the validation set
python eval.py --trained_model=weights/yolact_base_54_800000.pth --benchmark --max_images=1000
Images
# Display qualitative results on the specified image.
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --image=my_image.png
# Process an image and save it to another file.
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --image=input_image.png:output_image.png
# Process a whole folder of images.
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --images=path/to/input/folder:path/to/output/folder
Video
# Display a video in real-time. "--video_multiframe" will process that many frames at once for improved performance.
# If you want, use "--display_fps" to draw the FPS directly on the frame.
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --video_multiframe=4 --video=my_video.mp4
# Display a webcam feed in real-time. If you have multiple webcams pass the index of the webcam you want instead of 0.
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --video_multiframe=4 --video=0
# Process a video and save it to another file. This uses the same pipeline as the ones above now, so it's fast!
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --video_multiframe=4 --video=input_video.mp4:output_video.mp4
As you can tell, eval.py can do a ton of stuff. Run the --help command to see everything it can do.
python eval.py --help
Training
By default, we train on COCO. Make sure to download the entire dataset using the commands above.
- To train, grab an imagenet-pretrained model and put it in
./weights. - Run one of the training commands below.
- Note that you can press ctrl+c while training and it will save an
*_interrupt.pthfile at the current iteration. - All weights are saved in the
./weightsdirectory by default with the file name<config>_<epoch>_<iter>.pth.
- Note that you can press ctrl+c while training and it will save an
# Trains using the base config with a batch size of 8 (the default).
python train.py --config=yolact_base_config
# Trains yolact_base_config with a batch_size of 5. For the 550px models, 1 batch takes up around 1.5 gigs of VRAM, so specify accordingly.
python train.py --config=yolact_base_config --batch_size=5
# Resume training yolact_base with a specific weight file and start from the iteration specified in the weight file's name.
python train.py --config=yolact_base_config --resume=weights/yolact_base_10_32100.pth --start_iter=-1
# Use the help option to see a description of all available command line arguments
python train.py --help
Multi-GPU Support
YOLACT now supports multiple GPUs seamlessly during training:
- Before running any of the scripts, run:
export CUDA_VISIBLE_DEVICES=[gpus]- Where you should replace [gpus] with a comma separated list of the index of each GPU you want to use (e.g., 0,1,2,3).
- You should still do this if only using 1 GPU.
- You can check the indices of your GPUs with
nvidia-smi.
- Then, simply set the batch size to
8*num_gpuswith the training commands above. The training script will automatically scale the hyperparameters to the right values.- If you have memory to spare you can increase the batch size further, but keep it a multiple of the number of GPUs you're using.
- If you want to allocate the images per GPU specific for different GPUs, you can use
--batch_alloc=[alloc]where [alloc] is a comma seprated list containing the number of images on each GPU. This must sum tobatch_size.
Logging
YOLACT now logs training and validation information by default. You can disable this with --no_log. A guide on how to visualize these logs is coming soon, but now you can look at LogVizualizer in utils/logger.py for help.
Pascal SBD
We also include a config for training on Pascal SBD annotations (for rapid experimentation or comparing with other methods). To train on Pascal SBD, proceed with the following steps:
- Download the dataset from here. It's the first link in the top "Overview" section (and the file is called
benchmark.tgz). - Extract the dataset somewhere. In the dataset there should be a folder called
dataset/img. Create the directory./data/sbd(where.is YOLACT's root) and copydataset/imgto./data/sbd/img. - Download the COCO-style annotations from here.
- Extract the annotations into
./data/sbd/. - Now you can train using
--config=yolact_resnet50_pascal_config. Check that config to see how to extend it to other models.
I will automate this all with a script soon, don't worry. Also, if you want the script I used to convert the annotations, I put it in ./scripts/convert_sbd.py, but you'll have to check how it works to be able to use it because I don't actually remember at this point.
If you want to verify our results, you can download our yolact_resnet50_pascal_config weights from here. This model should get 72.3 mask AP_50 and 56.2 mask AP_70. Note that the "all" AP isn't the same as the "vol" AP reported in others papers for pascal (they use an averages of the thresholds from 0.1 - 0.9 in increments of 0.1 instead of what COCO uses).
Custom Datasets
You can also train on your own dataset by following these steps:
- Create a COCO-style Object Detection JSON annotation file for your dataset. The specification for this can be found here. Note that we don't use some fields, so the following may be omitted:
infoliscense- Under
image:license, flickr_url, coco_url, date_captured categories(we use our own format for categories, see below)
- Create a definition for your dataset under
dataset_baseindata/config.py(see the comments indataset_basefor an explanation of each field):
my_custom_dataset = dataset_base.copy({
'name': 'My Dataset',
'train_images': 'path_to_training_images',
'train_info': 'path_to_training_annotation',
'valid_images': 'path_to_validation_images',
'valid_info': 'path_to_validation_annotation',
'has_gt': True,
'class_names': ('my_class_id_1', 'my_class_id_2', 'my_class_id_3', ...)
})
- A couple things to note:
- Class IDs in the annotation file should start at 1 and increase sequentially on the order of
class_names. If this isn't the case for your annotation file (like in COCO), see the fieldlabel_mapindataset_base. - If you do not want to create a validation split, use the same image path and annotations file for validation. By default (see
python train.py --help),train.pywill output validation mAP for the first 5000 images in the dataset every 2 epochs.
- Class IDs in the annotation file should start at 1 and increase sequentially on the order of
- Finally, in
yolact_base_configin the same file, change the value for'dataset'to'my_custom_dataset'or whatever you named the config object above. Then you can use any of the training commands in the previous section.
Creating a Custom Dataset from Scratch
See this nice post by @Amit12690 for tips on how to annotate a custom dataset and prepare it for use with YOLACT.
Citation
If you use YOLACT or this code base in your work, please cite
@inproceedings{yolact-iccv2019,
author = {Daniel Bolya and Chong Zhou and Fanyi Xiao and Yong Jae Lee},
title = {YOLACT: {Real-time} Instance Segmentation},
booktitle = {ICCV},
year = {2019},
}
For YOLACT++, please cite
@article{yolact-plus-tpami2020,
author = {Daniel Bolya and Chong Zhou and Fanyi Xiao and Yong Jae Lee},
journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence},
title = {YOLACT++: Better Real-time Instance Segmentation},
year = {2020},
}
Contact
For questions about our paper or code, please contact Daniel Bolya.

 2 Jul 09, 2022
2 Jul 09, 2022
 14 Aug 24, 2022
14 Aug 24, 2022
 49 Dec 17, 2022
49 Dec 17, 2022
 3 Sep 09, 2022
3 Sep 09, 2022
 41 Nov 30, 2022
41 Nov 30, 2022
 95 Dec 14, 2022
95 Dec 14, 2022
 3 Jan 10, 2022
3 Jan 10, 2022
 63 May 22, 2021
63 May 22, 2021
 10 Jan 05, 2023
10 Jan 05, 2023
 25 Dec 20, 2022
25 Dec 20, 2022
 69 Dec 03, 2022
69 Dec 03, 2022
 13 Oct 09, 2022
13 Oct 09, 2022
 23 Dec 26, 2022
23 Dec 26, 2022
 3.1k Jan 04, 2023
3.1k Jan 04, 2023
 26 Dec 12, 2022
26 Dec 12, 2022
 33 Oct 14, 2022
33 Oct 14, 2022
 345 Jan 08, 2023
345 Jan 08, 2023
 1.4k Dec 07, 2022
1.4k Dec 07, 2022
 20 Sep 18, 2021
20 Sep 18, 2021
 85 Dec 14, 2022
85 Dec 14, 2022