Label-Efficient Semantic Segmentation with Diffusion Models
Official implementation of the paper Label-Efficient Semantic Segmentation with Diffusion Models
This code is based on datasetGAN and guided-diffusion.
Note: use --recurse-submodules when clone.
Overview
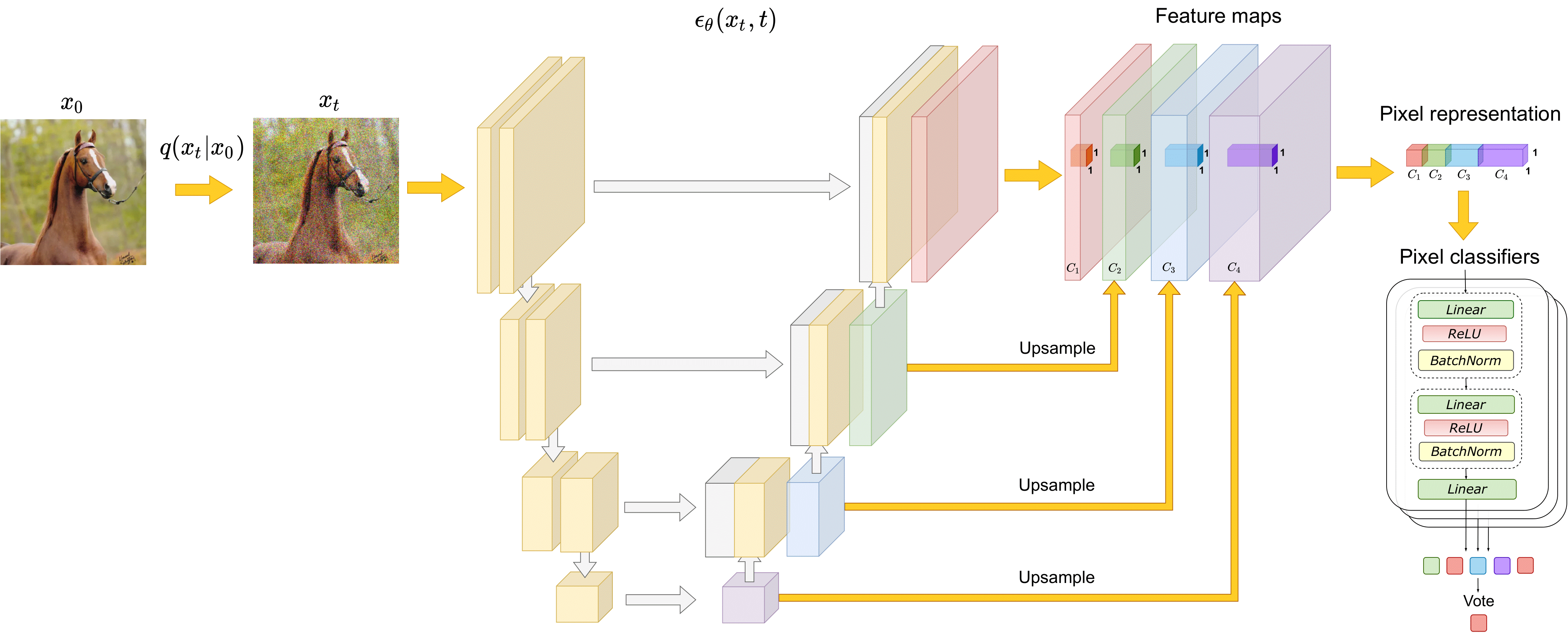
The paper investigates the representations learned by the state-of-the-art DDPMs and shows that they capture high-level semantic information valuable for downstream vision tasks. We design a simple segmentation approach that exploits these representations and outperforms the alternatives in the few-shot operating point in the context of semantic segmentation.
Dependencies
- Python >= 3.7
- Packages: see
requirements.txt
Datasets
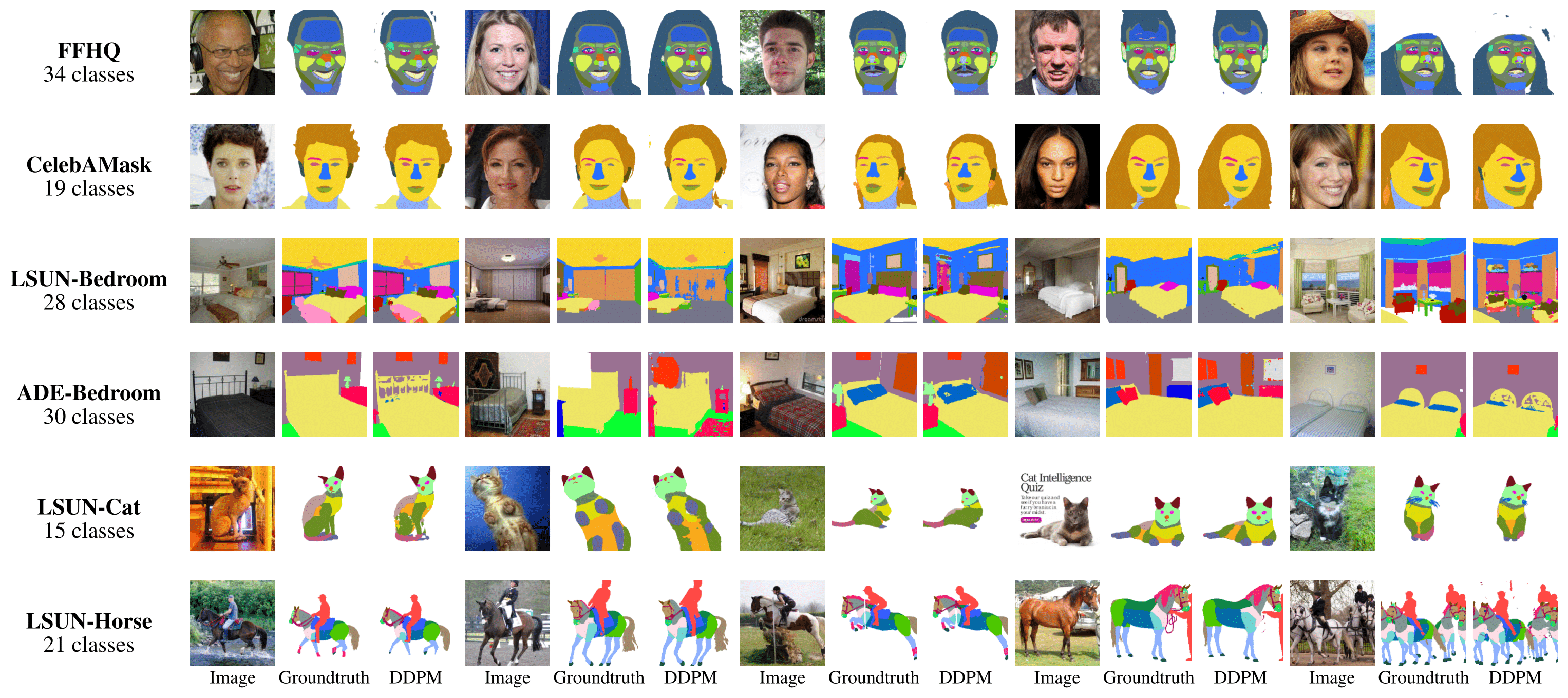
The evaluation is performed on 6 collected datasets with a few annotated images in the training set: Bedroom-18, FFHQ-34, Cat-15, Horse-21, CelebA-19 and ADE-Bedroom-30. The number corresponds to the number of semantic classes.
datasets.tar.gz (~47Mb)
DDPM
Pretrained DDPMs
The models trained on LSUN are adopted from guided-diffusion. FFHQ-256 is trained by ourselves using the same model parameters as for the LSUN models.
LSUN-Bedroom: lsun_bedroom.pt
FFHQ-256: ffhq.pt
LSUN-Cat: lsun_cat.pt
LSUN-Horse: lsun_horse.pt
Run
- Download the datasets:
bash datasets/download_datasets.sh - Download the DDPM checkpoint:
bash checkpoints/ddpm/download_checkpoint.sh - Check paths in
experiments//ddpm.json - Run:
bash scripts/ddpm/train_interpreter.sh
Available checkpoint names: lsun_bedroom, ffhq, lsun_cat, lsun_horse
Available dataset names: bedroom_28, ffhq_34, cat_15, horse_21, celeba_19, ade_bedroom_30
How to improve the performance
- Set input_activations=true in
experiments/./ddpm.json
In this case, the feature dimension is 18432. - Tune for a particular task what diffusion steps and UNet blocks to use.
DatasetDDPM
Synthetic datasets
To download DDPM-produced synthetic datasets (50000 samples, ~7Gb):
bash synthetic-datasets/gan/download_synthetic_dataset.sh
Run | Option #1
- Download the synthetic dataset:
bash synthetic-datasets/ddpm/download_synthetic_dataset.sh - Check paths in
experiments//datasetDDPM.json - Run:
bash scripts/datasetDDPM/train_deeplab.sh
Run | Option #2
-
Download the datasets:
bash datasets/download_datasets.sh -
Download the DDPM checkpoint:
bash checkpoints/ddpm/download_checkpoint.sh -
Check paths in
experiments//datasetDDPM.json -
Train an interpreter on a few DDPM-produced annotated samples:
bash scripts/datasetDDPM/train_interpreter.sh -
Generate a synthetic dataset:
bash scripts/datasetDDPM/generate_dataset.sh
Please specify the hyperparameters in this script for the available resources.
On 8xA100 80Gb, it takes about 12 hours to generate 10000 samples. -
Run:
bash scripts/datasetDDPM/train_deeplab.sh
One needs to specify the path to the generated data. See comments in the script.
Available checkpoint names: lsun_bedroom, ffhq, lsun_cat, lsun_horse
Available dataset names: bedroom_28, ffhq_34, cat_15, horse_21
SwAV
Pretrained SwAVs
We pretrain SwAV models using the official implementation on the LSUN and FFHQ-256 datasets:
LSUN-Bedroom: lsun_bedroom.pth
FFHQ-256: ffhq.pth
LSUN-Cat: lsun_cat.pth
LSUN-Horse: lsun_horse.pth
Training setup:
| Dataset | epochs | batch-size | multi-crop | num-prototypes |
|---|---|---|---|---|
| LSUN | 200 | 1792 | 2x256 + 6x108 | 1000 |
| FFHQ-256 | 400 | 2048 | 2x224 + 6x96 | 200 |
Run
- Download the datasets:
bash datasets/download_datasets.sh - Download the SwAV checkpoint:
bash checkpoints/swav/download_checkpoint.sh - Check paths in
experiments//swav.json - Run:
bash scripts/swav/train_interpreter.sh
Available checkpoint names: lsun_bedroom, ffhq, lsun_cat, lsun_horse
Available dataset names: bedroom_28, ffhq_34, cat_15, horse_21, celeba_19, ade_bedroom_30
DatasetGAN
Opposed to the official implementation, more recent StyleGAN2(-ADA) models are used.
Synthetic datasets
To download GAN-produced synthetic datasets (50000 samples):
bash synthetic-datasets/gan/download_synthetic_dataset.sh
Run
Since we almost fully adopt the official implementation, we don't provide our reimplementation here. However, one can still reproduce our results:
- Download the synthetic dataset:
bash synthetic-datasets/gan/download_synthetic_dataset.sh - Change paths in
experiments//datasetDDPM.json - Change paths and run:
bash scripts/datasetDDPM/train_deeplab.sh
Available dataset names: bedroom_28, ffhq_34, cat_15, horse_21
Results
- Performance in terms of mean IoU:
| Method | Bedroom-28 | FFHQ-34 | Cat-15 | Horse-21 | CelebA-19 | ADE-Bedroom-30 |
|---|---|---|---|---|---|---|
| ALAE | 20.0 ± 1.0 | 48.1 ± 1.3 | -- | -- | 49.7 ± 0.7 | 15.0 ± 0.5 |
| VDVAE | -- | 57.3 ± 1.1 | -- | -- | 54.1 ± 1.0 | -- |
| GAN Inversion | 13.9 ± 0.6 | 51.7 ± 0.8 | 21.4 ± 1.7 | 17.7 ± 0.4 | 51.5 ± 2.3 | 11.1 ± 0.2 |
| GAN Encoder | 22.4 ± 1.6 | 53.9 ± 1.3 | 32.0 ± 1.8 | 26.7 ± 0.7 | 53.9 ± 0.8 | 15.7 ± 0.3 |
| SwAV | 41.0 ± 2.3 | 54.7 ± 1.4 | 44.1 ± 2.1 | 51.7 ± 0.5 | 53.2 ± 1.0 | 30.3 ± 1.5 |
| DatasetGAN | 31.3 ± 2.7 | 57.0 ± 1.0 | 36.5 ± 2.3 | 45.4 ± 1.4 | -- | -- |
| DatasetDDPM | 46.9 ± 2.8 | 56.0 ± 0.9 | 45.4 ± 2.8 | 60.4 ± 1.2 | -- | -- |
| DDPM | 46.1 ± 1.9 | 57.0 ± 1.4 | 52.3 ± 3.0 | 63.1 ± 0.9 | 57.0 ± 1.0 | 32.3 ± 1.5 |
- Examples of segmentation masks predicted by the DDPM-based method:
Cite
@misc{baranchuk2021labelefficient,
title={Label-Efficient Semantic Segmentation with Diffusion Models},
author={Dmitry Baranchuk and Ivan Rubachev and Andrey Voynov and Valentin Khrulkov and Artem Babenko},
year={2021},
eprint={2112.03126},
archivePrefix={arXiv},
primaryClass={cs.CV}
}

 28 Jan 04, 2023
28 Jan 04, 2023
 1 Feb 26, 2022
1 Feb 26, 2022
 227 Dec 20, 2022
227 Dec 20, 2022
 70 Nov 16, 2022
70 Nov 16, 2022
 35 Jan 03, 2023
35 Jan 03, 2023
 31 Dec 22, 2022
31 Dec 22, 2022
 7 Nov 24, 2022
7 Nov 24, 2022
 20 Nov 14, 2022
20 Nov 14, 2022
 393 Dec 29, 2022
393 Dec 29, 2022
 154 Dec 16, 2022
154 Dec 16, 2022
 19 Oct 27, 2022
19 Oct 27, 2022
 129 Jan 04, 2023
129 Jan 04, 2023
 524 Jan 08, 2023
524 Jan 08, 2023
 51 Dec 25, 2022
51 Dec 25, 2022
 34 Jan 19, 2022
34 Jan 19, 2022
 39 Dec 13, 2022
39 Dec 13, 2022
 74 Dec 05, 2022
74 Dec 05, 2022
 16 Dec 23, 2022
16 Dec 23, 2022
 8 Nov 08, 2022
8 Nov 08, 2022